Results and Conclusions
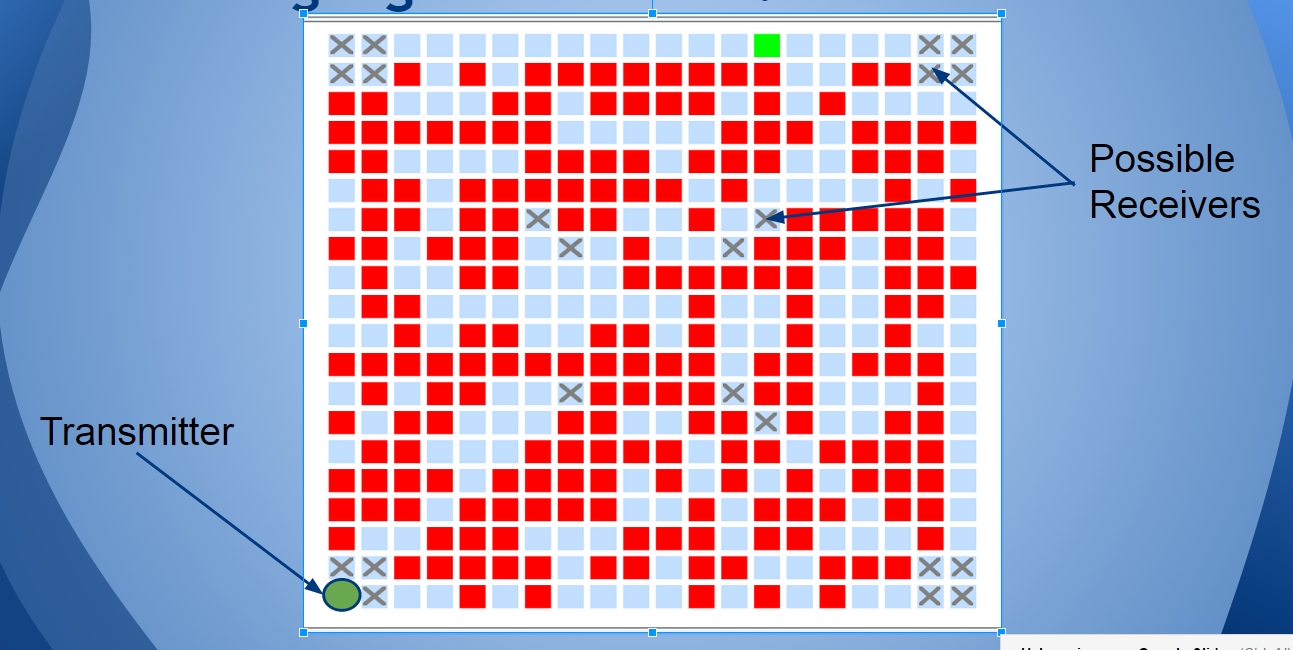
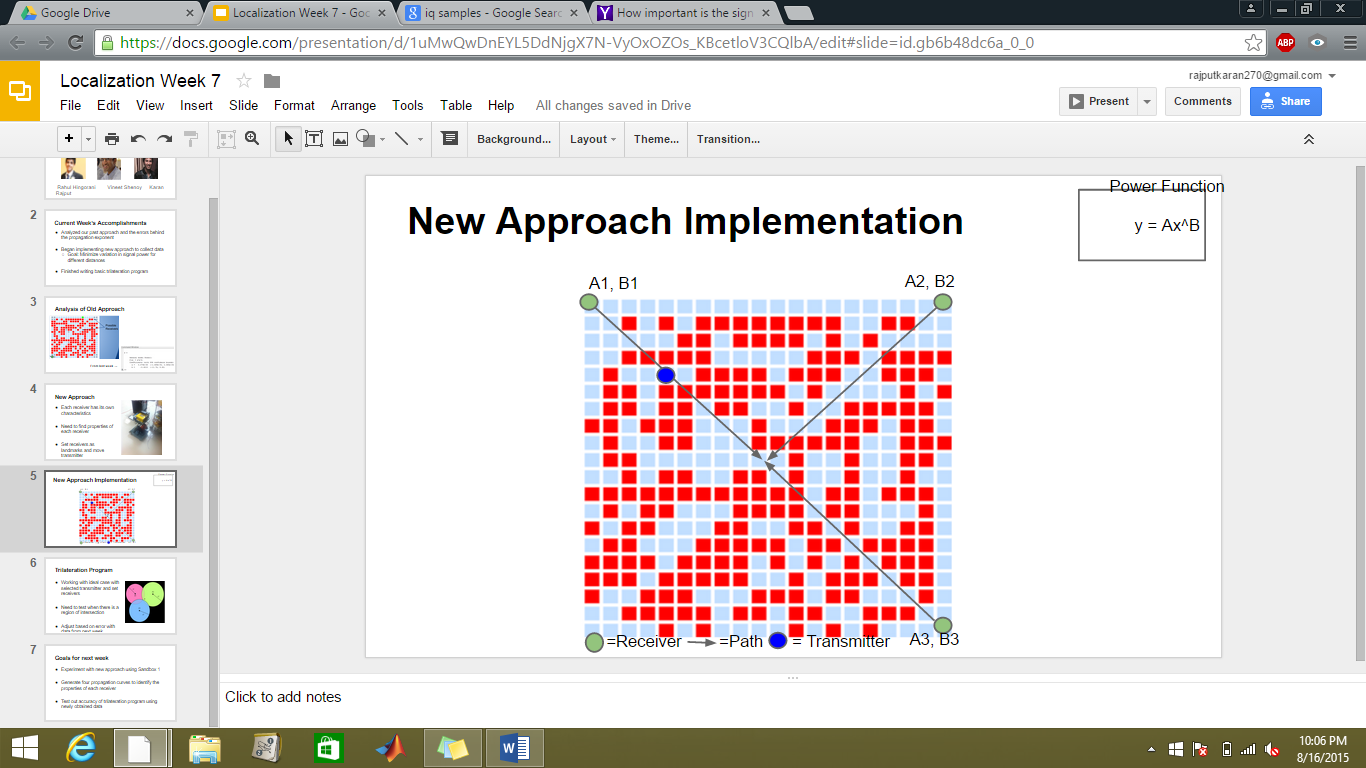
We used a trilateration program to analyze the data collected from these calibrated devices. The trilateration takes in 9 distance as inputs (3 distances from each receiver at 3 frequencies) and gives the location of the transmitter as the output. It does so but drawing three circles with the distance readings set as the radii and finds the intersection.
Our recent results have shown that if the transmitter is close to the center of the grid, the localization is most accurate. More data is necessary to come to any conclusions about accuracy of the program and results.
Transmitter Placed at (7.12, 6.4) m
Trilateration Estimate: (7.92, 8.19) m
Error: 1.75 m
Transmitter Placed at (2.25, 2.04) m
Trilateration Estimate: (5.77, 4.42) m
Error : 4.25 m
The project is no where closer to completion. Indoor localization is a topic that has been worked on for years now. For any effective method to be finalized, accurate results and collaboration are key. More work will be done on our project in the near future and updates will be posted on this page regularly.
}}}
=== Weekly Presentations ===
Presentations are done on a weekly basis before other research interns or professors. Presentations include the group's accomplishments over the past week as well as goals for the following week
[https://docs.google.com/presentation/d/19tk2BQUCDE6SibGhI5q5ZbgrDVxeivjv-o5k8SRUtpU/pub?start=false&loop=false&delayms=3000 Week 2][[BR]]
[https://docs.google.com/presentation/d/1bB5xOKHx_YjLfJ1QgAFkz9POWl7zakhP11L4NGwn4Mg/pub?start=false&loop=false&delayms=3000 Week 3][[BR]]
[https://docs.google.com/presentation/d/1Zwrn0vNEuN4WQPvoh9i3Pk9lSppQn_kekqOq8mlOKdM/pub?start=false&loop=false&delayms=60000 Week 4][[BR]]
[https://docs.google.com/presentation/d/1g_KbZgF6W24HXhJNMXTMtkahgETWTUDOlhRXyfhY3hA/pub?start=false&loop=false&delayms=3000 Week 5][[BR]]
[https://docs.google.com/presentation/d/1I1gc6wtnZkyP5FN9h_qYw-3CHTYzYk9VVXQfDYBt-Ps/pub?start=false&loop=false&delayms=5000 Week 6] [[BR]]
[https://docs.google.com/presentation/d/1uMwQwDnEYL5DdNjgX7N-VyOxOZOs_KBcetloV3CQlbA/pub?start=false&loop=false&delayms=5000 Week 7] [[BR]]
[https://docs.google.com/presentation/d/1VErJIzLNoOnpdwJVy60t8QTDD7V3giSe0EcwfRldJS0/pub?start=false&loop=false&delayms=5000 Week 8][[BR]]
[https://docs.google.com/presentation/d/1vls9I32fbq7ubQY-pouM0mt68GfNYfKto1SNjZ_iURA/pub?start=false&loop=false&delayms=5000 Week 9][[BR]]
[https://docs.google.com/presentation/d/1bl6XcSzHVppZVYgLfC7Zobgx1fosXx3bSCTkBhmmabg/edit?pli=1#slide=id.p Final Week][[BR]]
=== Team ===
{{{
#!html