
| Version 23 (modified by , 2 years ago) ( diff ) |
|---|
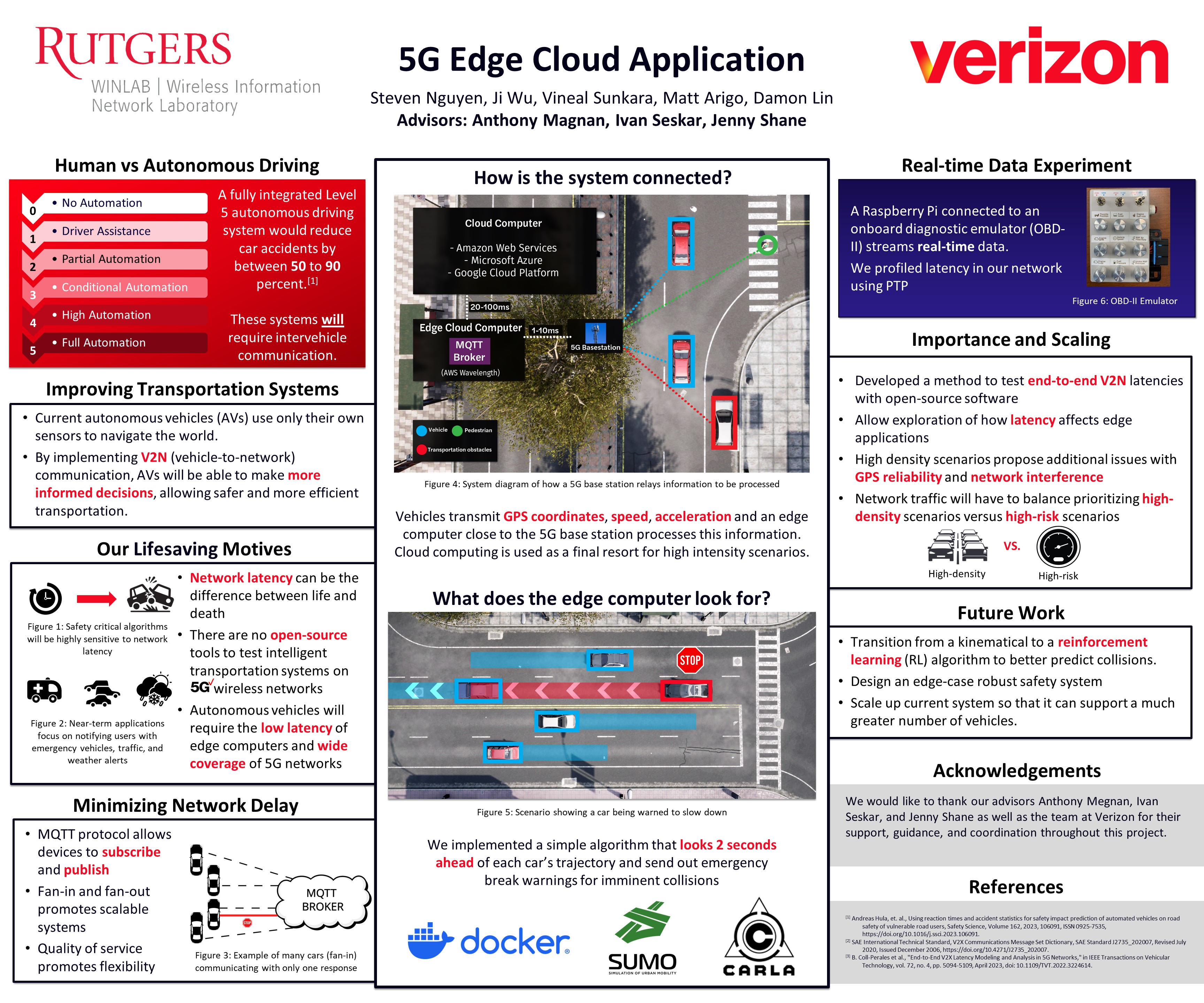
5G Edge Cloud Application
5G Edge Cloud Application
WINLAB Summer Internship 2024
Advisors: Anthony Magnan, Ivan Seskar, Jennifer Shane
Group Members: Vineal Sunkara, Matt Arigo, Steven Nguyen, Ji Wu, Damon Lin
Project Objective
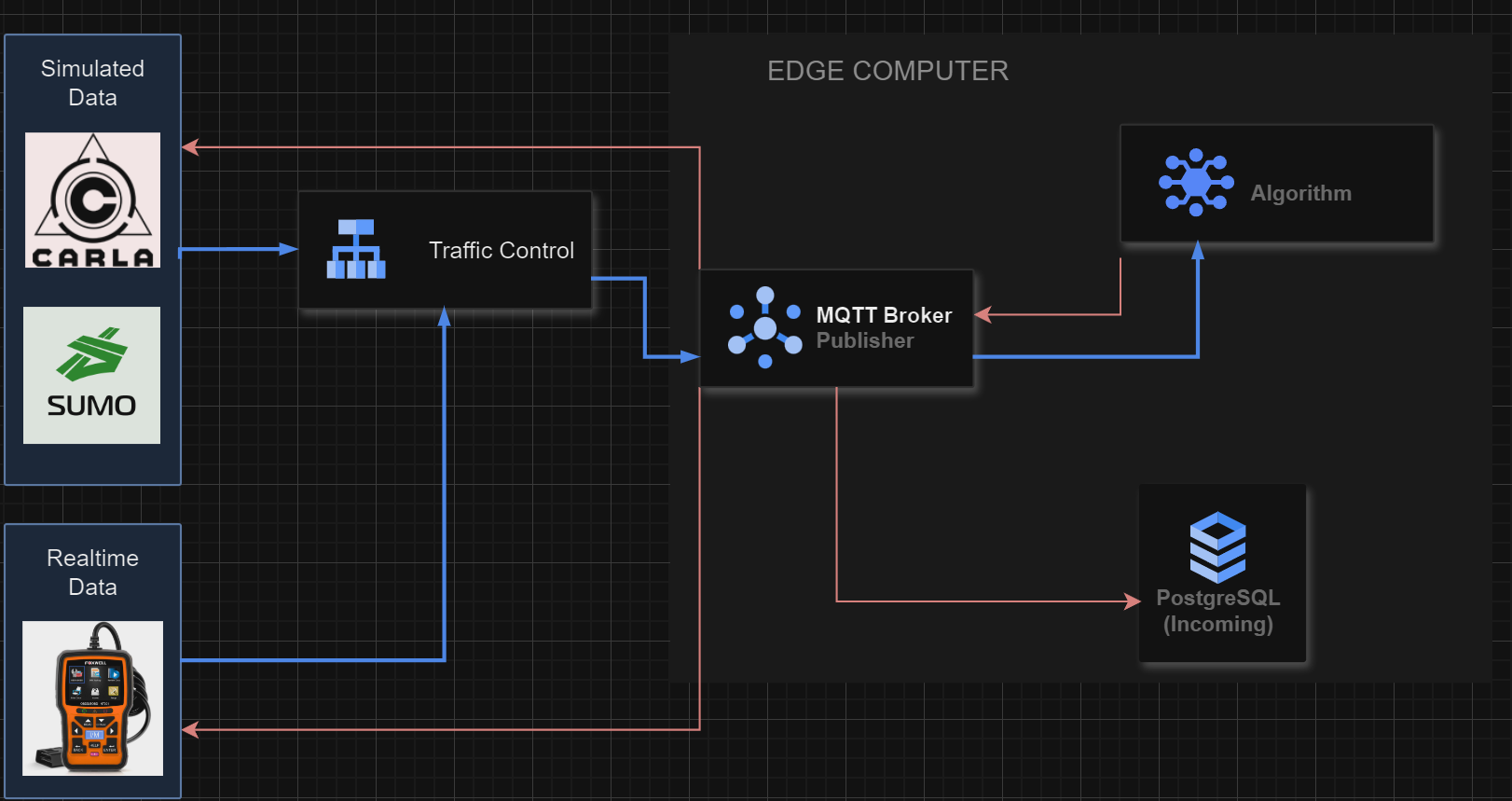
Our project aims to create a navigation system that utilizes 5G edge cloud computing to reduce the likelihood of vehicular accidents. We will build this by utilizing synthetic data we generated off of SUMO and Carla. We will also utilize real data sets given to us to integrate the two sets while inspecting the sets for differences.
Week 1
Summary
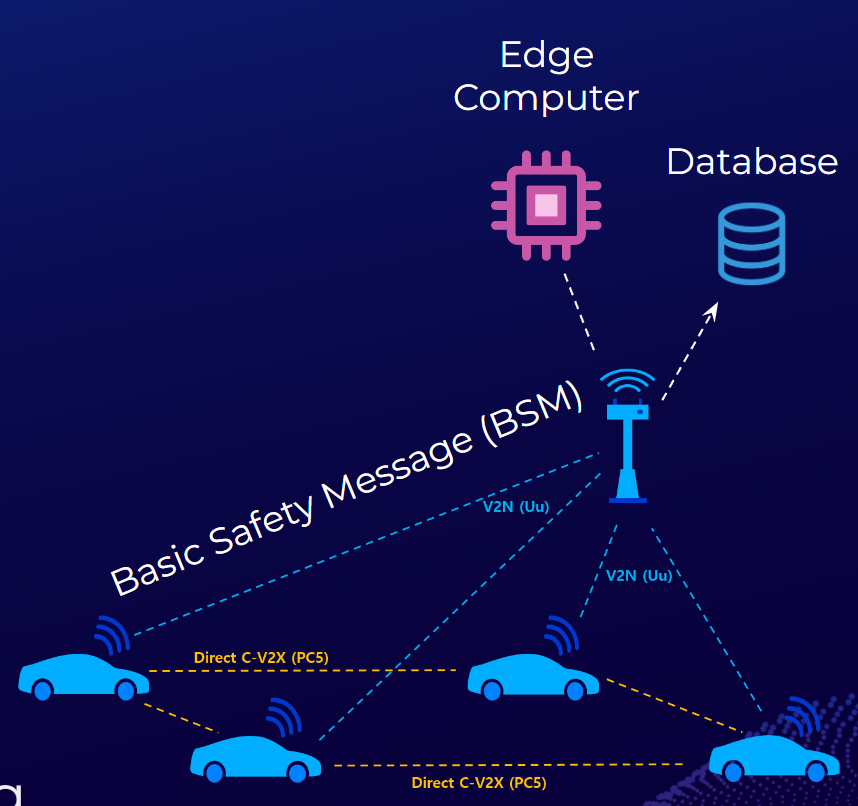
- Looked into key terms such as MQTT, Multi-Access Edge Computing (MEC), Enhanced Vehicle-to-Everything Communication (eV2X Communication), and Virtual Roadside Units (vRSU)
- Installed and tested Mosquitto, an MQTT broker on Linux, through these commands:
sudo apt-add-repository ppa:mosquitto-dev/mosquitto-ppa sudo apt-get update sudo apt-get install mosquitto sudo apt-get install mosquitto-clients sudo apt clean

Week 2
Summary
- Met with our advisors to discuss and define the project's direction
- To be written
- Took a look at simulation software CARLA (Car Learning to Act) and SUMO (Simulation for Urban Mobility)
- Installed and tested Paho, another MQTT broker on Linux, as a substitute for Mosquitto
- Paho is a Python-based MQTT broker, which is much more compatible with CARLA and SUMO

Week 3
Summary
- Began simulating scenarios on both CARLA and SUMO
- Figured out first person interface in CARLA
- Set up Gitlab repository for message encoding to transcribe data received from CARLA and SUMO
- Start receiving telemetry data from SUMO

Week 4
Summary
- Began working on our base scenario
- Worked on an algorithm that calculates when braking is necessary
- Started integration of our scenario in CARLA with our database and algorithm
- Started learning about Docker for later project utilization

Week 5
Summary
- Made base scenario for SUMO and CARLA
- Refined algorithm by adding a filter system before running the crash detector.
- Finished Postgres database setup.

Week 6
Summary
- Began research on traffic control.
- Set up test cases for encoding and decoding.
- Shifted away from Docker for CARLA and moved to node images.

Week 7
Summary
- Finished algorithm and conducting unit tests.
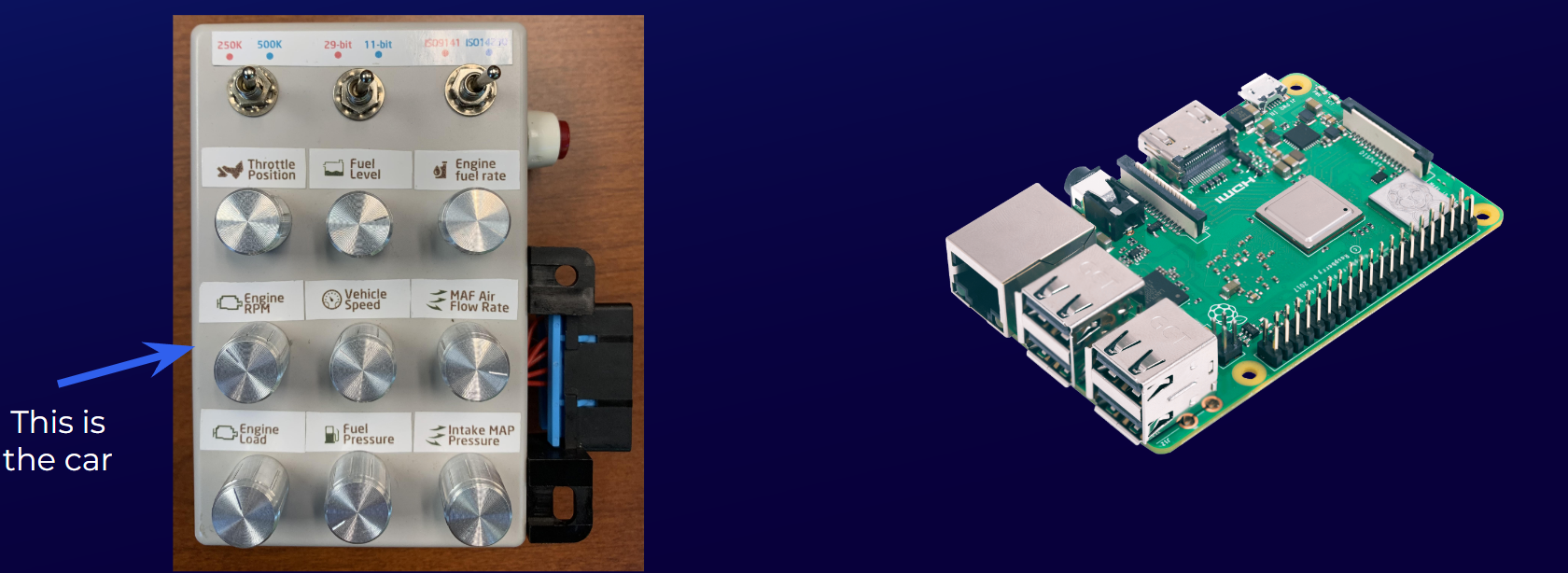
- Set up Raspberry Pi and OBDII Emulator in order to simulate real-time vehicular diagnostics.
- Prepared for server to move from intersection to outdoor nodes.
- Prepared for project demo that is taking place in week 8.

Week 8
Week 8 Presentation(Short)
Week 8 Presentation(Long)
Summary
- Presented demo to Verizon.
- Simulated data from OBDII to get real vehicle data.
- Did a lot of debugging and integration.
Week 9
Summary
- Utilized Manim to visualize and troubleshoot algorithm and MQTT pipeline
- Discovered (through the GIF below) that the current implementation of the algorithm does not detect collisions in a particular scenario
- Determined that vehicle boxes (like those in games) are more accurate than rays
- Bonus Work: OBDII module
- Successfully sent telemetry data from the OBDII through the broker to a subscriber
- Attempting to configure latency to synchronize the publisher and the subscriber

Resources
Attachments (12)
- mosquittoTesting.png (179.4 KB ) - added by 2 years ago.
- pahoTesting.png (244.1 KB ) - added by 2 years ago.
- CARLA.png (1.9 MB ) - added by 2 years ago.
- carla-demo.gif (2.9 MB ) - added by 2 years ago.
- Base.png (164.4 KB ) - added by 2 years ago.
- RealDiagram.png (123.6 KB ) - added by 2 years ago.
- NewDiagram.png (133.2 KB ) - added by 2 years ago.
- OBDII.png (857.9 KB ) - added by 2 years ago.
- WorldPlotScene.gif (124.3 KB ) - added by 2 years ago.
- trueDemo.gif (3.3 MB ) - added by 2 years ago.
- 5G Edge Cloud Application Final Poster.jpg (1.8 MB ) - added by 2 years ago.
- WINLAB Team Photo.jpg (4.7 MB ) - added by 2 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Note:
See TracWiki
for help on using the wiki.